零基础python教程
微服务
贪心算法
python教学
图像阴影消除
视觉检测
概率论
pat考试
redis安装
论文
DBA
debian
外贸独立站
Smart Tomcat
断点
webshell链接
天气App
IL汇编
云原生博客目录
异常
动作捕捉
2024/4/13 14:38:51光惯混合动作捕捉系统:开启空间定位全新时代
在当今的技术前沿,光惯混合动作捕捉系统正在崭露头角,成为定位技术的新标杆,更是一项生活中不可或缺的实用工具。它是一个集光学与惯性测量技术于一体的全新定位解决方案,巧妙地融合了光学与惯性测量的优势,以其突破性…

足部IMU在复杂场景中行走定位
随着微机电系统(MEMS)技术的快速发展,基于MEMS的惯性导航系统(INS)在任意环境的基站定位方面发挥着至关重要的作用。惯性导航具有自主性强、定位频率高、功耗低、实时性强等特点。因此更适合单兵作战、反恐行动、应急救…
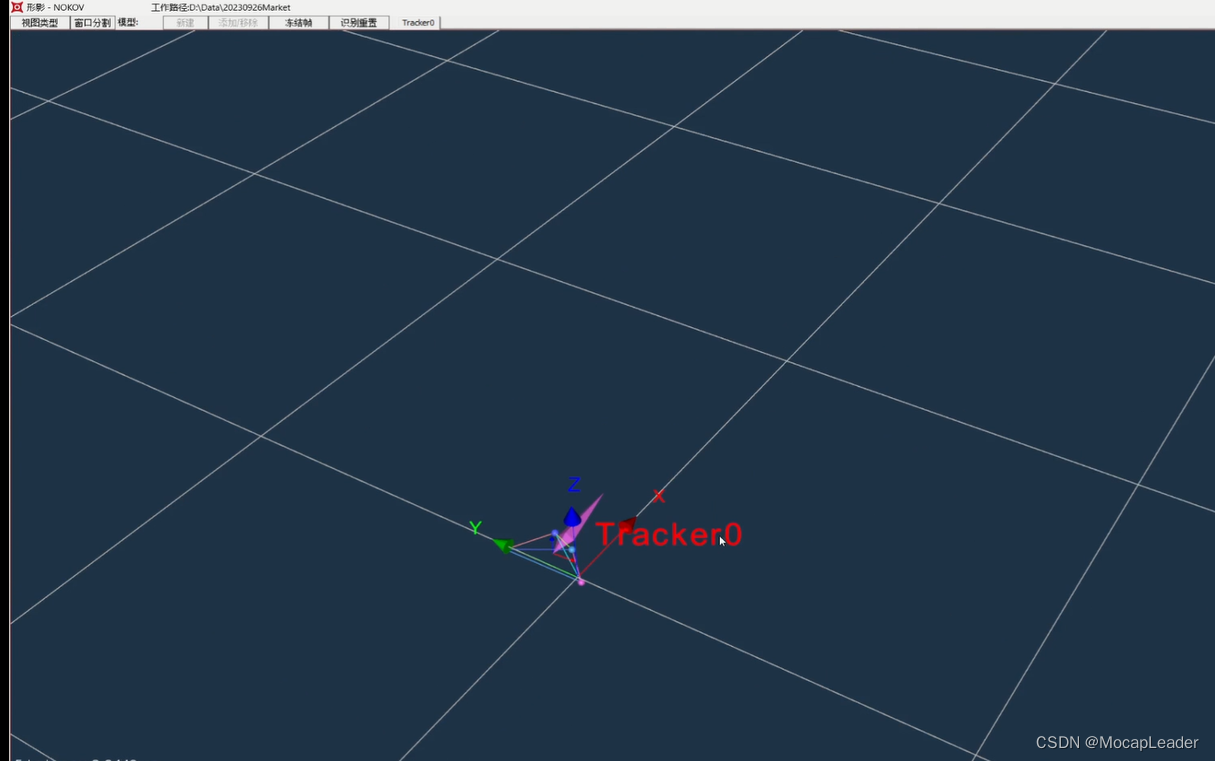
动作捕捉系统进行坐标系转换
动作捕捉系统在机器人等应用中常出现被测物与动捕坐标系不一致的问题。这时就需要进行坐标系的转换。在NOKOV度量动作捕捉系统软件中,可以对被测物的坐标系原点偏移量进行设置,实现被测物坐标系与大地坐标系的重合。
一、坐标系偏移操作
在形影动捕软件…

Pixhawk+PX4+VRPN +NOKOV无人机飞控平台动捕数据传输
NOKOV度量动作捕捉系统可以很好的适配PX4无人机飞控平台。进行数据通信的时候,使用SDK或者VRPN的方式都是可以的。本文演示NOKOV度量动作捕捉系统通过VRPN与PX4平台进行数据传输的方法。
一、硬件准备
1、准备无人机
这里准备的无人机,飞控版是Pixhaw…

Windows系统C++语言环境下通过SDK进行动作捕捉数据传输
NOKOV度量动作捕捉系统可以与市面上主流的操作系统和编程语言实现通信。可以在Windows系统C语言环境下通过SDK进行动作捕捉数据传输。
一、形影软件设置
1、实时模式和后处理模式都可以通过SDK传输数据。以后处理模式为例。将模式切换到后处理模式 2、加载一个刚体数据 3、打…

动作捕捉系统通过SDK与MATLAB/Simulink通信
NOKOV度量动作捕捉系统支持通过SDK与MATLAB/Simulink通信,将动作数据传入MATLAB/Simulink进行实时解算。
一、形影软件设置
1、在形影软件中加载数据 2、选择网卡地址 3、勾选“使用SDK” 4、点击播放按钮。这时候SDK的数据就已经向外发送了
二、MATLAB接收数据…

IMU在网球运动伤害预防中的作用
来自悉尼大学的研究团队最近的一项实验探讨了上肢网球损伤及其与球员使用的正手击球技术的关联。开发的可穿戴技术配备了惯性测量单元 (IMU),可以深入分析前臂肌肉活动、握力和冲击传递——这些成分与肘部肌腱病等慢性损伤有关。
采用IMU传感…

FOHEART H1数据手套驱动Optitrack光学动捕双手运动(Unity3D)
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。
双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01
客户端软件
分别安装MotiveBody与MotionVenus并校准人体与数据…

IMU用于无人机故障诊断
最近,来自韩国的研究团队通过开发以IMU为中心的数据驱动诊断方法,旨在多旋翼飞行器可以自我评估其性能,即时识别和解决推进故障。该方法从单纯的常规目视检查跃升为复杂的诊断细微差别,标志着无人机维护的范式转变。
与依赖额外传…
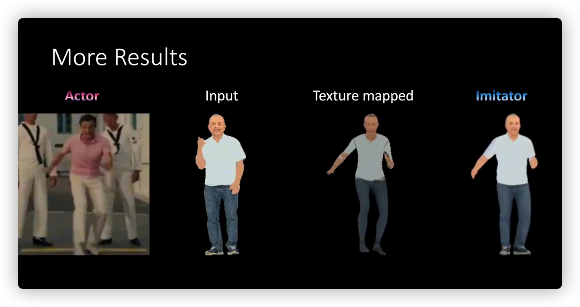
GenAI+3D:AI只需一张参考图像即可生成3D动画
一、技术框架概述: 3DHM(3D Human Motion)是一种基于扩散模型的人体动画生成框架,能够通过单一的参考图像生成任何人物的3D动画。其核心组件包括学习关于人体和服装不可见部分的先验知识以及以合适的服装和纹理呈现新的身体姿势。 二、定位:3DHM的定位是通过学习先验知识和…

动作捕捉系统通过SDK与LabVIEW通信
运动分析、VR、机器人等应用中常使用LabVIEW对动作捕捉数据进行实时解算。NOKOV度量动作捕捉系统支持通过SDK与LabVIEW进行通信,将动作数据传入LabVIEW。
一、软件设置
1、形影软件设置
1、将模式切换到后处理模式 2、加载一个刚体数据 3、打开软件设置 4、选择网…

树莓派连接NOKOV接收动作捕捉数据:通过SDK进行
NOKOV度量动作捕捉系统支持通过SDK与树莓派通信,将动作捕捉数据实时传输给树莓派。
一、形影软件设置
1、首先打开形影动捕软件,加载一段后处理数据。这里选择了一段小车飞机的协同数据。 在这个数据里面可以看到,整个场景里面有两个刚体&a…

基于Kresling折纸结构双稳态空间的无人机着陆系统新结构
摘要:本文利用动捕技术对无人机着陆系统模型进行动力学分析,对折纸结构双稳态着陆系统性能进行测试,为无人机着陆系统结构设计提供创新方法。 近期,一篇关于无人机着陆系统的研究论文“Evolution of UAV landing structures in th…